6 Bolt Torque Control Tips
In this article, we will discuss bolt-tightening control methods from the actual situation of torque and clamping force in bolted joints.
1. Torque control method
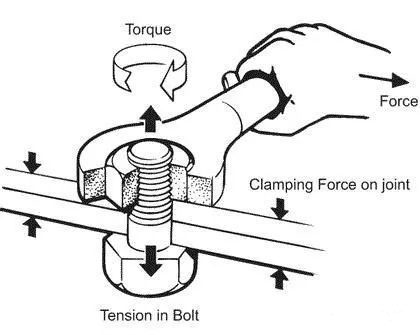
The torque control method is the most initial and simplest. It is based on the threaded connection when the axial clamping force F is tightened, it is proportional to the tightening torque T, which can be expressed by a formula T=K·F, and this K is the torque coefficient. When a screw is designed, its axial clamping force F is known, and the tightening torque T is set through the process. Our tightening torque is also regulated by the process department. However, in the assembly workshop, it often happens that the tightening torque is reached but the assembled bolts are still unqualified.
Why is this?
The key lies in the torque coefficient. The main fluctuation factor of the torque coefficient K is the comprehensive friction coefficient u, that is to say, the accuracy of bolts and screw holes, impurities, and whether they are bumped will affect the comprehensive friction coefficient u. Moreover, this K value is also related to temperature. The experiment by Sumitomo Corporation in Japan proves that the torque coefficient K will decrease by 0.31% for every 1°C increase in the ambient temperature. Is the torque control method accurate? To deepen the influence for everyone, according to the tightening experiment report of the German Association of Engineers, when the error of the tightening torque T is ±0 (that is, no error applied torque), the error of the axial clamping force of the bolt can reach ±27.2%.
Application steps:
• Directly or indirectly controlled torque application
• Actual target torque is usually 50% to 85% of yield torque
• Used in fastening elastic areas
• 90% of loading torque is used to overcome friction
• Accuracy of preload ±25%
The advantages of the torque control method are: low cost and a simple tightening tool torque wrench can be used to check the tightening quality.
Its disadvantages are insufficient tightening accuracy, unable to fully utilize the potential of the material, and great environmental impact (temperature, bolt threads, impurities, bumps, etc.).
2. Torque-angle control method (TA) is also called the hyperelastic control method
The torque-rotation angle control method is to tighten the bolt to a small torque, generally 40%-60% of the tightening torque (developed after process verification), and then start from this point to tighten a specified rotation angle control method.
This method is based on a certain rotation angle, the bolt produces a certain axial elongation and the connecting piece is compressed. The purpose of doing this is to screw the bolts to the tight contact surface and overcome some surface unevenness and unevenness, and the axial clamping force required later is generated by the rotation angle. After calculating the rotation angle, the influence of frictional resistance on the axial clamping force no longer exists. Therefore, its accuracy is higher than that of the simple torque control method. The key point of the torque control method is to measure the starting point of the rotation angle. Once the rotation angle is determined, we can obtain a very high tightening accuracy.
Due to the more advanced tightening method, a tool that adapts to productivity has been produced, which is the electric tightening tool. It is composed of a motor-drive gear-elbow gear-sensor, etc. It is relatively easy to set the early warning torque and starting angle.
Application steps:
• Apply a fixed torque (starting (door opening) torque)
• Turn the fastener to reach the predetermined corner
• At the initial stage of tightening from yield, this moment is also used in the elastic region.
• It is necessary to determine the initial (door opening) torque and rotation angle parameters by experiment
• Accuracy of preload ±15%
Torque-Angle Control Method (TA) Advantages: High tightening accuracy and large axial clamping force can be obtained.
Disadvantages: The control system is relatively complicated, and it is necessary to measure two data of pre-tightening torque and rotation angle. It is difficult for the quality department to find an appropriate method to check and follow up on the tightening results.
3. Yield point control method (TG)
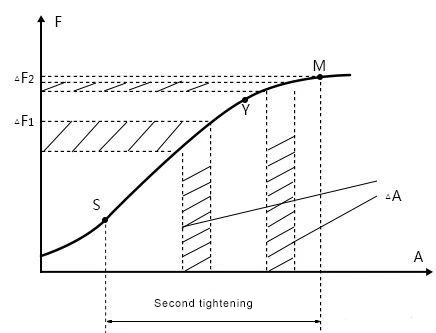
It can be seen from the above clamping force diagram that the bolt axial preload error ΔF2 in the elastic zone is much smaller than the bolt axial preload error ΔF1 in the elastic zone for the same rotation angle error.
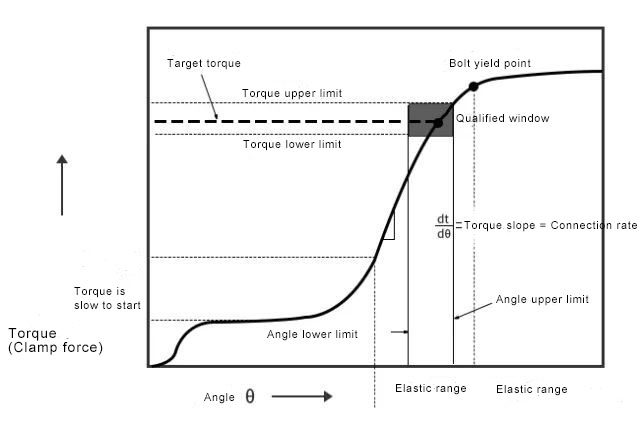
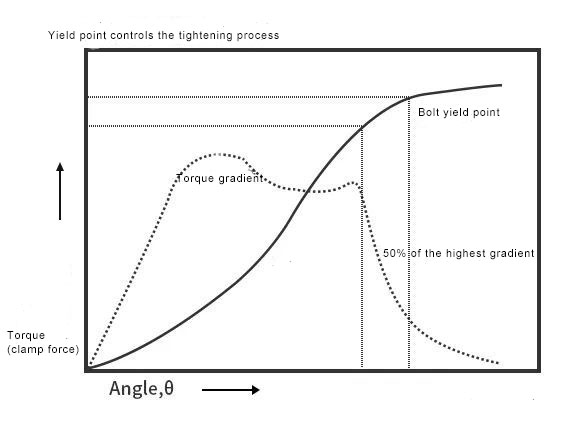
The yield point control method is a method of stopping the tightening after the bolt is tightened to the yield point. It is a high-precision tightening method developed by using the phenomenon of material yielding. This control method determines the yield point by continuously calculating and judging the slope of the tightening torque/rotation angle curve.
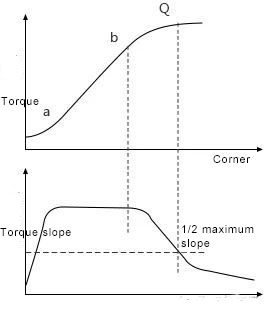
During the tightening process of the bolt, the change curve of torque/rotation angle is shown in the comparison chart of torque and torque slope. At the beginning of the real tightening, the slope rises quickly and then remains constant after a brief slowdown (a_b interval). After passing point b, its slope drops rapidly after a brief slow drop. When the slope drops to a certain value (generally defined, as when the slope drops to 1/2 of the maximum value), it means that the yield point has been reached (that is, the Q point in the torque comparison diagram), and a signal to stop tightening is sent immediately.
The tightening accuracy of the yield point control method is very high, and the error of the pre-tightening force can be controlled within ±4%, but its accuracy mainly depends on the yield strength of the bolt itself.
Application steps:
•Torque and rotation angle are monitored during tightening
• When the maximum gradient of a point drops to determine the maximum gradient and yield point
• Utilize maximum compression force potential
• No reduction in friction
• Allows observation of torque angle per tightening
• Bolts can no longer be used
• Accuracy of preload ±8%
4. Seat point – corner control method (SPA)
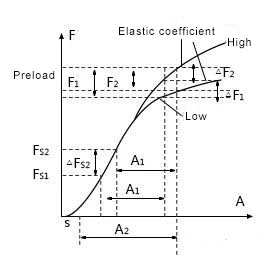
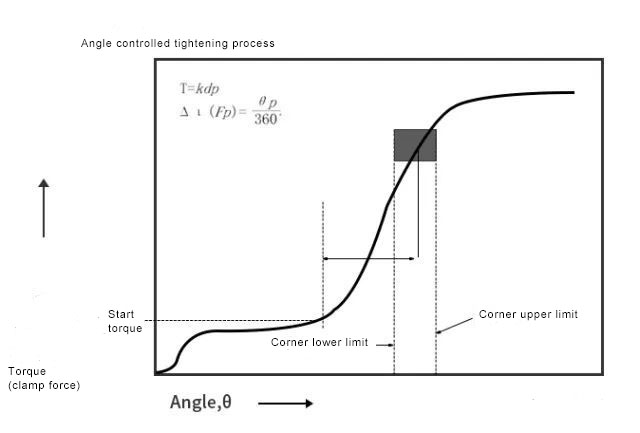
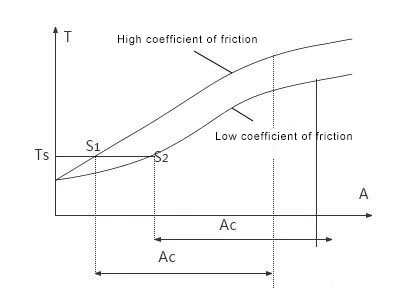
The seating point-rotation angle control method is a new control method that is developed based on the torque-rotation angle T-A method. The TA method uses a certain pre-torque Ts as the starting point of the rotation angle, while the SPA method calculates the starting point of the rotation angle, using the intersection point S of the linear segment slope of the torque curve and the coordinate of the rotation angle A.
In the figure, F1 is the maximum bolt axial pre-tightening force error of the TA method, and F2 is the maximum bolt axial pre-tightening force error of the SPA method.
It can be seen from the figure that when the TA method is used, due to the error of the pre-torque TS (ΔTs=Ts2-Ts1, corresponding to the bolt axial pre-tightening force error ΔFs). That is, after turning through the same angle A1, compared to the two tightening conditions with different elastic coefficients, the error of the axial pre-tightening force of the bolt is F1.
Even if the elastic coefficients are equal, there are certain errors due to the existence of ΔTs (see ΔF1 and ΔF2 in the figure).
If the SPA method is used, since the seating point S has turned through the corner A2, compared to the two tightening conditions with different elastic coefficients, the error of the axial pre-tightening force of the bolt is F2. F2 is smaller than F1, that is, the tightening accuracy of the seating point-rotation angle control method is higher than that of the torque-rotation angle control method.
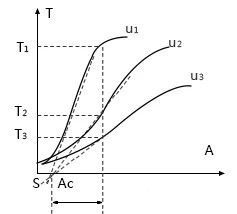
Using the SPA method, the influence of the friction coefficient on the axial pre-tightening force of the bolt can be almost eliminated. The next figure shows the torque-rotation angle relationship curves corresponding to different friction coefficients during tightening. The coefficient of friction in the figure is µ1>µ2>µ3.
Although the slopes of the torque-rotation angle relationship curves corresponding to different friction coefficients are different, their seat points (the intersection point of the slope of the linear section of the curve and the horizontal axis) are not much different.
Therefore, by twisting another angle Ac from this point, the influence of different friction coefficients on the axial pre-tightening force of the bolt can be eliminated.
Compared with the TA method, the main advantage of the SPA method is that it can overcome the torque error that has occurred at Ts, so the tightening accuracy can be further improved.
5. Bolt elongation method (QA)
The QA method is a control method that determines whether the yield point is reached by measuring the elongation of the bolt. Although the yield strength of each bolt is inconsistent, it will also cause errors in tightening, but the errors are generally very small.
The method of measuring the elongation of bolts in the QA method is generally measured by ultrasonic waves. The echo frequency of ultrasonic waves increases with the elongation of the bolts. Therefore, a certain echo frequency represents a certain amount of elongation.
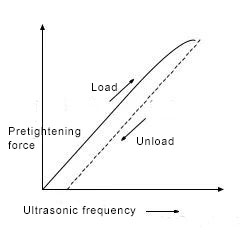
The diagram is the principle of the QA method.
As the bolts are tightened and loosened, the curves of the changes in the echo frequency measured by the ultrasonic instrument as the bolts are tightened (elongated) and loosened (reduced elongation) do not coincide. The rising frequency of the axial preload of the same bolt is lower than the falling frequency. In this way, care should be taken when used to measure the yield point of bolts.
6. Torque slope method
The torque slope method is a method to control the initial pre-tightening force by using the change of the torque slope value in the torque-rotation angle curve as an index.
This tightening method usually regards the yield-tightening axial force of the bolt as the target value for controlling the initial pre-tightening force.
This tightening method is generally used when the dispersion of the initial pre-tightening force of the bolt is small and the bolt strength can be used to the maximum extent. However, since the control of the initial pre-tightening force by this tightening method is basically the same as that of the rotation angle method in the plastic zone, it is necessary to strictly control the yield point of the bolt.
Compared with the corner method in the plastic zone, this tightening method has fewer problems in terms of the plasticity of the bolt, that is, repeated use, and has certain advantages. However, the tightening tools are more complicated and expensive.
In the end
There are many methods of bolt torque control, each with its advantages and disadvantages. Or the tool is expensive, or the error is large, or the calculation is complicated. Therefore, TorcStark still recommends using professional bolt-tightening tools to control the torque of bolts during tightening and dismounting. Such as electric/pneumatic torque wrenches, hydraulic wrenches/tensioners, etc. Using bolt tools can completely eliminate the need to worry about errors and calculations, and it is also completely affordable in terms of price.